Приветствую Вас Гость
Пятница
28.11.2025
12:04
28.11.2025
12:04
Космопорт "Nefelana"
| Форма входа |
| Поиск |
| Календарь |
| Наш опрос |
|
Оцените мой сайт
1. Отлично 2. Хорошо 3. Неплохо 4. Ужасно 5. Плохо Всего ответов: 543
|
| Друзья сайта |
|
|
| Статистика |
Онлайн всего: 1 Гостей: 1 Пользователей: 0 |
Главная » 2010 Июль 2 » Программируемая материя: Самооригами
Программируемая материя: Самооригами | 21:03 | |
Тонкий слой материала, состоящего из небольших взаимосвязанных треугольников,
сам складывается в самолетик или кораблик. Как раз тот случай, когда тяжело
верится даже собственным глазам. В идеале, по мнению авторов работы, группы под руководством профессора Роберта Вуда, они должны прийти к созданию
«умных» материалов, меняющих форму в зависимости от внешних условий – а
возможно, даже к созданию своего рода «швейцарского армейского ножа» для
роботов, универсального манипулятора, в нужны момент способного превратиться
именно в нужный инструмент. Пока, конечно, достижения их не столь велики, но уже первые шаги привлекают серьезное внимание. «Процесс начинается с разработки алгоритма складывания, - поясняет
профессор Вуд, - Примерно такого же, как набор инструкций в книге по оригами.
Отталкиваясь от желаемой конечной формы, мы определяем места и порядок сгибов
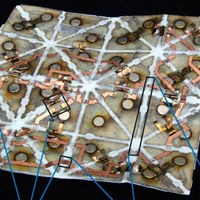
материи».  Робот-оригами состоит из 32-х складывающихся поверхностей, позволяющих ему
перейти к двум формам, заимствованным у бумажного кораблика и самолетика.
Складывание обеспечивают приводы (А и В), расположенные как на верхней, так и на
нижней поверхностях. Места сгибов оснащаются гибкими сочленениями (С и D) и
кремниевыми склейками (E и F) «Процесс начинается с разработки алгоритма складывания, - поясняет
профессор Вуд, - Примерно такого же, как набор инструкций в книге по оригами.
Отталкиваясь от желаемой конечной формы, мы определяем места и порядок сгибов
материи». Сама материя представляет собой композит, включающий жесткий каркас из
сочлененных треугольников и подвижные гибкие соединения между ними. В движение
они приходят благодаря тонким – не толще листа фольги – силовым приводам,
команды на которые подает встроенные гибкие электронные компоненты. В прототипе
использовались 25 таких приводов, организованных в 5 согласованно действующих
групп: приводя в движение одну за другой, материя сама складывается в нужную
форму.  Паттерны складывания в форму бумажного кораблика. Слева – компьютерная
симуляция, справа – фотография реального процесса В принципе, это робот, только робот-оригами, способный принимать форму в зависимости от команды оператора. Так что главным достижением разработчиков по праву можно назвать создание теоретических основ для подобных роботов, обоснование универсальных алгоритмов планирования для складывания нужных форм. И если пока что прототипы способны образовывать лишь две (известные каждому
еще со школы) формы – самолетика и кораблика – сама концепция куда более
многообещающа. Вплоть до того же универсального инструмента, превращающегося,
при необходимости, то в молоток, то в совок. Читайте также популярно о настоящем древнем оригами, японском искусстве
складывания бумаги, с точки зрения науки: «Перегибы на местах». По пресс-релизу Harvard School of Engineering and Applied
Sciences | ||
| Просмотров: 810 | Добавил: Nefelana | | ||